ਆਮ ਤੌਰ 'ਤੇ, ਲੇਜ਼ਰ ਦੀ ਕਿਰਨ ਦੀ ਤੀਬਰਤਾ ਗੌਸੀਅਨ ਹੁੰਦੀ ਹੈ, ਅਤੇ ਲੇਜ਼ਰ ਦੀ ਵਰਤੋਂ ਦੀ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ, ਆਪਟੀਕਲ ਪ੍ਰਣਾਲੀ ਨੂੰ ਆਮ ਤੌਰ 'ਤੇ ਉਸ ਅਨੁਸਾਰ ਬੀਮ ਨੂੰ ਬਦਲਣ ਲਈ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ।
ਜਿਓਮੈਟ੍ਰਿਕ ਆਪਟਿਕਸ ਦੀ ਰੇਖਿਕ ਥਿਊਰੀ ਤੋਂ ਵੱਖ, ਗੌਸੀਅਨ ਬੀਮ ਦੀ ਆਪਟੀਕਲ ਪਰਿਵਰਤਨ ਥਿਊਰੀ ਗੈਰ-ਰੇਖਿਕ ਹੈ, ਜੋ ਕਿ ਲੇਜ਼ਰ ਬੀਮ ਦੇ ਮਾਪਦੰਡਾਂ ਅਤੇ ਆਪਟੀਕਲ ਸਿਸਟਮ ਦੀ ਸਾਪੇਖਿਕ ਸਥਿਤੀ ਨਾਲ ਨੇੜਿਓਂ ਜੁੜੀ ਹੋਈ ਹੈ।
ਗੌਸੀਅਨ ਲੇਜ਼ਰ ਬੀਮ ਦਾ ਵਰਣਨ ਕਰਨ ਲਈ ਬਹੁਤ ਸਾਰੇ ਮਾਪਦੰਡ ਹਨ, ਪਰ ਸਪਾਟ ਰੇਡੀਅਸ ਅਤੇ ਬੀਮ ਕਮਰ ਸਥਿਤੀ ਵਿਚਕਾਰ ਸਬੰਧ ਅਕਸਰ ਵਿਹਾਰਕ ਸਮੱਸਿਆਵਾਂ ਨੂੰ ਹੱਲ ਕਰਨ ਲਈ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ। ਭਾਵ, ਘਟਨਾ ਬੀਮ ਦਾ ਕਮਰ ਦਾ ਘੇਰਾ (ω1) ਅਤੇ ਆਪਟੀਕਲ ਪਰਿਵਰਤਨ ਪ੍ਰਣਾਲੀ ਦੀ ਦੂਰੀ (z1) ਜਾਣੇ ਜਾਂਦੇ ਹਨ, ਅਤੇ ਫਿਰ ਪਰਿਵਰਤਿਤ ਬੀਮ ਕਮਰ ਦਾ ਘੇਰਾ (ω2), ਬੀਮ ਕਮਰ ਸਥਿਤੀ (z2) ਅਤੇ ਸਪਾਟ ਰੇਡੀਅਸ (ω3) ਕਿਸੇ ਵੀ ਸਥਿਤੀ 'ਤੇ (z) ਪ੍ਰਾਪਤ ਹੁੰਦੇ ਹਨ। ਲੈਂਸ 'ਤੇ ਫੋਕਸ ਕਰੋ, ਅਤੇ ਲੈਂਸ ਦੇ ਅਗਲੇ ਅਤੇ ਪਿਛਲੇ ਕਮਰ ਦੀਆਂ ਸਥਿਤੀਆਂ ਨੂੰ ਕ੍ਰਮਵਾਰ ਸੰਦਰਭ ਪਲੇਨ 1 ਅਤੇ ਰੈਫਰੈਂਸ ਪਲੇਨ 2 ਦੇ ਰੂਪ ਵਿੱਚ ਚੁਣੋ, ਜਿਵੇਂ ਕਿ ਚਿੱਤਰ 1 ਵਿੱਚ ਦਿਖਾਇਆ ਗਿਆ ਹੈ।
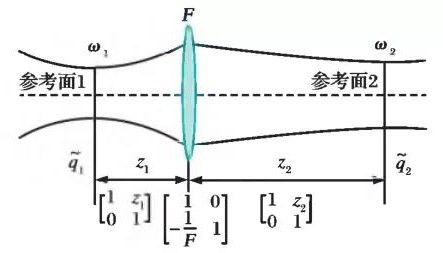
ਚਿੱਤਰ 1 ਪਤਲੇ ਲੈਂਸ ਦੁਆਰਾ ਗੌਸ ਦਾ ਪਰਿਵਰਤਨ
ਪੈਰਾਮੀਟਰ ਦੇ ਅਨੁਸਾਰ q ਗੌਸੀ ਬੀਮ ਦਾ ਸਿਧਾਂਤ, ਦ q1 ਅਤੇ q2 ਦੋ ਸੰਦਰਭ ਜਹਾਜ਼ਾਂ 'ਤੇ ਇਸ ਤਰ੍ਹਾਂ ਪ੍ਰਗਟ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ:
ਉਪਰੋਕਤ ਫਾਰਮੂਲੇ ਵਿੱਚ: The fe1 ਅਤੇ fe2 ਗੌਸੀ ਬੀਮ ਪਰਿਵਰਤਨ ਤੋਂ ਪਹਿਲਾਂ ਅਤੇ ਬਾਅਦ ਵਿੱਚ ਕ੍ਰਮਵਾਰ ਕਨਫੋਕਸ ਪੈਰਾਮੀਟਰ ਹਨ। ਗੌਸੀਅਨ ਬੀਮ ਖਾਲੀ ਥਾਂ ਵਿੱਚੋਂ ਲੰਘਣ ਤੋਂ ਬਾਅਦ z1, ਫੋਕਲ ਲੰਬਾਈ ਵਾਲਾ ਪਤਲਾ ਲੈਂਸ F ਅਤੇ ਖਾਲੀ ਥਾਂ z2, ਇਸਦੇ ਅਨੁਸਾਰ ਅ ਬ ਸ ਡ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਮੈਟ੍ਰਿਕਸ ਥਿਊਰੀ, ਹੇਠ ਦਿੱਤੇ ਪ੍ਰਾਪਤ ਕੀਤੇ ਜਾ ਸਕਦੇ ਹਨ:

ਇਸ ਦੌਰਾਨ ਸ. q1 ਅਤੇ q2 ਹੇਠ ਲਿਖੇ ਸਬੰਧਾਂ ਨੂੰ ਪੂਰਾ ਕਰੋ:

ਉਪਰੋਕਤ ਫਾਰਮੂਲਿਆਂ ਨੂੰ ਜੋੜ ਕੇ ਅਤੇ ਸਮੀਕਰਨ ਦੇ ਦੋਨਾਂ ਸਿਰਿਆਂ 'ਤੇ ਅਸਲ ਅਤੇ ਕਾਲਪਨਿਕ ਭਾਗਾਂ ਨੂੰ ਕ੍ਰਮਵਾਰ ਬਰਾਬਰ ਬਣਾ ਕੇ, ਅਸੀਂ ਪ੍ਰਾਪਤ ਕਰ ਸਕਦੇ ਹਾਂ:
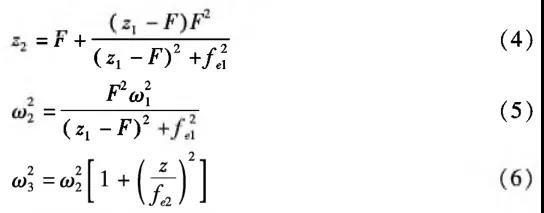
ਸਮੀਕਰਨਾਂ (4) - (6) ਪਤਲੇ ਲੈਂਸ ਵਿੱਚੋਂ ਲੰਘਣ ਤੋਂ ਬਾਅਦ ਕਮਰ ਦੀ ਸਥਿਤੀ ਅਤੇ ਗੌਸੀਅਨ ਬੀਮ ਦੇ ਸਪਾਟ ਸਾਈਜ਼ ਵਿਚਕਾਰ ਪਰਿਵਰਤਨ ਸਬੰਧ ਹਨ।
ਪੋਸਟ ਟਾਈਮ: ਅਗਸਤ-27-2021